Overview
The drone is made to satisfy the learning objectives of the FabLab club’s students. With various functions such as weather predicting and fire detecting, the drone’s purposes justify the students’ intention to help Egypt overcome many environmental crises.
Remotely controlled, the students took advantage of great tools like a flutter programming language, mainly to send data from an Esp32 chip. With a high accuracy level, the drone’s sensors (DHT11 - HC-SR04 - KY-026) draw a negligible range of errors, making it the best life-saver in most situations.
Supported by both batteries and PV panels, the drone is expected to store electricity in batteries in the mornings while working using the PV panels and use those batteries to supply the drone itself at night.
Goals
The project is application of what the students learned in the club, so it matches:
- The aim of learning through practicing.
- The desire of the students to help their country overcome many crises.
- The purpose of getting a solid understanding of microcontrollers and chips.
- The goal of the club in teaching the students how to code Embedded Systems and to work independently from scratch.
Tools
Building this project, the students worked on various concepts from drawing and sketching to coding and 3D CAD designing depending on these tools:
- ESP-wroom-32 chip

- 4 DC Motors

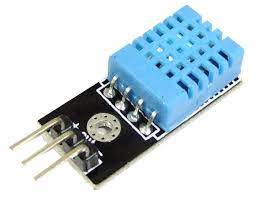
- DHT11 (Humidity Sensor)
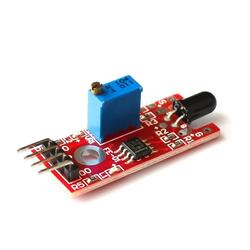
- KY-026 (Flame Sensor)
- Double-paged PV panel

- Jumper wires

Specifications
Led
Sensor
Functions
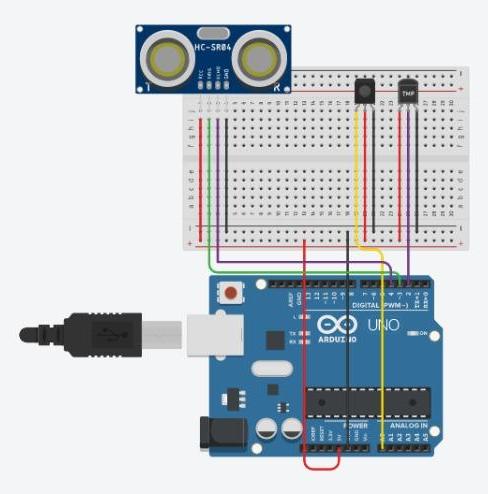
Sensor
#include "DHT.h"
#define echoPin 4
#define trigPin 3
#define DHTPIN 2
long duration;
float distance;
DHT dht(DHT11, DHTTYPE);
void setup() {
Serial.begin(9600);
pinMode(trigPin, OUTPUT);
pinMode(echoPin, INPUT);
dht.begin();
}
void loop() {
float h = dht.readHumidity();
// Read temperature as Celsius (the default)
float t = dht.readTemperature();
// Read temperature as Fahrenheit (isFahrenheit = true)
float f = dht.readTemperature(true);
// Check if any reads failed and exit early (to try again).
if (isnan(h) || isnan(t) || isnan(f)) {
Serial.println(F("Failed to read from DHT sensor!"));
return;
}
// Compute heat index in Fahrenheit (the default)
float hif = dht.computeHeatIndex(f, h);
// Compute heat index in Celsius (isFahreheit = false)
float hic = dht.computeHeatIndex(t, h, false);
Serial.print(F("Humidity: "));
Serial.print(h);
Serial.print(F("% Temperature: "));
Serial.print(t);
Serial.print(F("°C "));
Serial.print(f);
Serial.print(F("°F Heat index: "));
Serial.print(hic);
Serial.print(F("°C "));
Serial.print(hif);
Serial.println(F("°F"));
digitalWrite(trigPin, LOW);
delayMicroseconds(2);
// Sets the trigPin HIGH (ACTIVE) for 10 microseconds
digitalWrite(trigPin, HIGH);
delayMicroseconds(10);
digitalWrite(trigPin, LOW);
// Reads the echoPin, returns the sound wave travel time in microseconds
duration = pulseIn(echoPin, HIGH);
// Calculating the distance
distance = duration * 0.034 / 2; // Speed of sound wave divided by 2 (go and back)
// Displays the distance on the Serial Monitor
Serial.print("Drone Height: ");
Serial.print(distance / 100);
Serial.println(" m");
Serial.println("\t ---- **** ----");
delay(1000);
float sensorValue = analogRead(A0);
if (sensorValue < 570) {
Serial.println("There is a fire out there! ");
Serial.print("The value is: ");
Serial.print(sensorValue);
Serial.println(" nm");
delay(500);
}
else
{
Serial.println("There is no fire! Stay safe :)");
Serial.print("The value is: ");
Serial.print(sensorValue);
Serial.println(" nm");
delay(500);
}
}
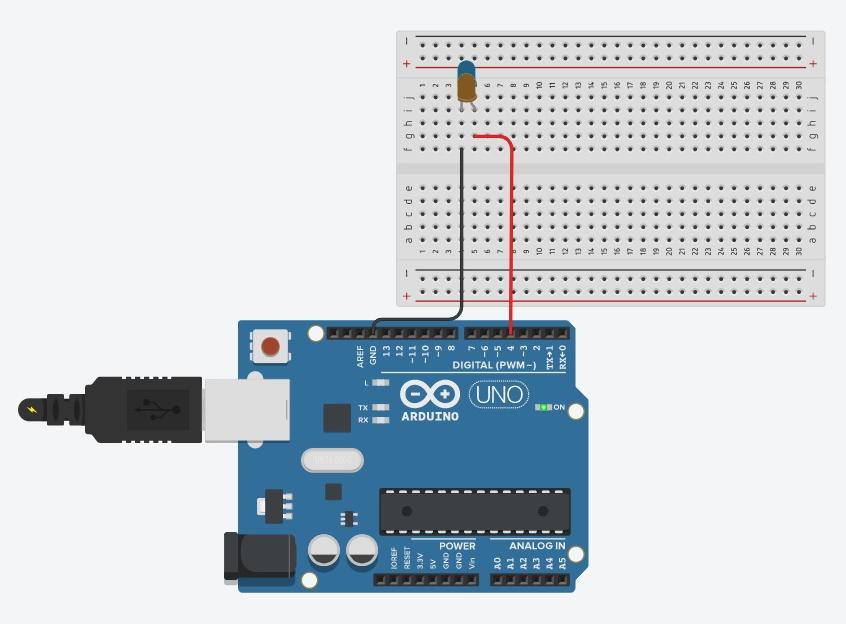
Led
int LEDs = 4;
//
void setup()
{
pinMode(LEDs, OUTPUT);
}
void loop()
{
digitalWrite(LEDs, HIGH);
delay(1000); // Wait for 1000 millisecond(s)
digitalWrite(LEDs, LOW);
delay(1000); // Wait for 1000 millisecond(s)
}
DC Motors
#include <DC_Motor.h>
DC_Motor MotorA(9,A0, A1);
DC_Motor MotorB(3,A2, A3);
// MotorA
int enA = 9;
int in1 = A0;
int in2 = A1;
// MotorB
int enB = 3;
int in3 = A2;
int in4 = A3;
void setup()
{
// Set all the motor control pins to outputs
pinMode(enA, OUTPUT);
pinMode(enB, OUTPUT);
pinMode(in1, OUTPUT);
pinMode(in2, OUTPUT);
pinMode(in3, OUTPUT);
pinMode(in4, OUTPUT);
}
void loop() {
if (F)
{
// This is Forward
// Set Motor A Forward
MotorA.set_speed(40);
MotorA.forward_with_set_speed();
// Set Motor B Forward
MotorB.set_speed(40);
MotorB.forward_with_set_speed();
}
else if (B)
{
// This is Backward
// Set Motor A Backward
MotorA.set_speed(80);
MotorA.reverse_with_set_speed()
// Set Motor B Backward
MotorB.set_speed(80);
MotorB.reverse_with_set_speed()
}
if (L)
{
// Move Left
// Set Motor A Forward
MotorA.set_speed(40);
MotorA.forward_with_set_speed();
}
else if (R)
{
// Move Right
// Map the number to a value of 255 maximum
// Set Motor A Forward
MotorA.set_speed(40);
MotorA.forward_with_set_speed();
}
}